利用深度学习让机器人指尖接触
布里斯托大学的研究人员最近训练了一个基于深度神经网络的模型来收集关于三维物体的触觉信息。在《IEEE机器人与自动化》杂志发表的一篇论文中,他们将深度学习技术应用于具有感知功能的机器人指尖,发现这项技术可以推断出更多关于周围环境的信息。
进行这项研究的研究人员之一内森莱波拉教授告诉TechXplore:“我们的总体想法是,在控制机器人与周围环境进行物理交互时,人为地重现触摸。”“人类这样做是无意的,例如,当他们用手指在一个物体上刷以感知其形状时。然而,背后的计算却出奇的复杂。我们通过将深度学习应用于人类,在机器人上实现了这种类型的物理交互。类似于人类皮肤的指尖。”
近十年来,莱波拉教授一直试图重塑机器人的触觉。在他之前的作品中,他使用了更传统的机器学习技术,比如概率分类器。然而,他发现这些技术只允许机器人执行非常基本的任务,比如用缓慢的敲击动作感受简单的2D形状。
莱波拉教授说:“这篇新论文的突破在于,我们在自然复杂物体上使用的方法在三维空间中工作,使指尖像人类一样滑动。”“因为过去几年在深度学习方面的进步,我们可以做到这一点。”
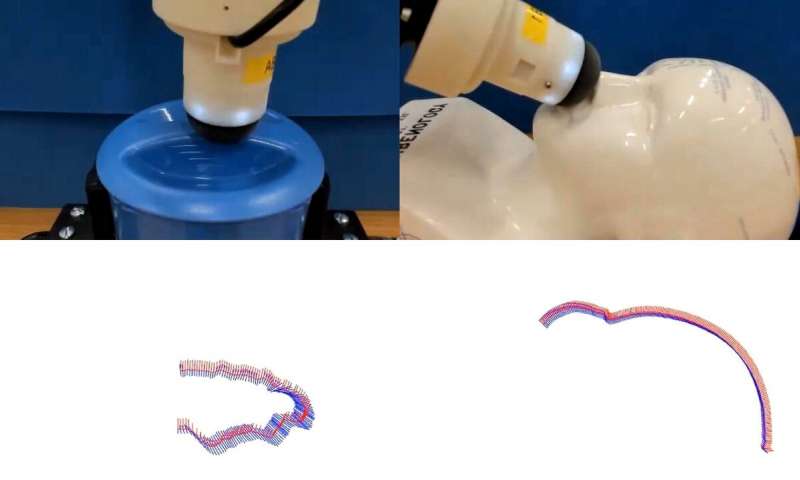
为机器人提供触觉可以帮助控制他们的手和指尖,这样他们就可以估计物体或与他们接触的物体部分的形状和纹理。例如,当机器人沿着表面上的边缘滑动时,机器人可能能够估计边缘的角度并相应地移动其机器人手指。
莱波拉教授说:“深度学习使我们能够构建从感官数据到边缘角度等表面特征的可靠地图。”“这很困难,因为在表面上滑动像人一样柔软的指尖会扭曲收集的数据。过去,我们无法从表面形状中分离出这种失真,但在这项工作中,我们成功地进行了深度卷积训练神经网络,其中包括触觉数据失真的示例,这使我们能够在几分之一度内生成精确的表面角度估计。”

通过收集精确的表面角度估计,由Lepora教授和他的同事设计的深度学习技术可以更好地控制机械手的指尖。未来,这种方法可以为机器人提供与人类相似的物理灵巧性,使其能够根据与其交互的物体有效地调整抓取和操纵策略。
到目前为止,研究人员已经通过将其与单个机器人指尖集成来证明其技术的有效性。但未来可以应用到软体机器人的所有指尖和四肢,使其可以像人类一样操作工具,完成操控任务。这可能最终为开发更高效的机器人用于各种环境铺平道路,包括设计用于完成家务、在农场采摘农产品或满足医疗机构患者需求的机器人。
莱波拉教授说:“我的实验室还生产了3D打印指尖和具有触觉感知的完整机器人,可以复制人类的触觉。”“在接下来的研究中,我们打算使用人工智能的方法(比如本文提出的方法)来研究与整个触觉机器人手的智能交互,这将使机器人能够更有效地处理工具或其他物体。”
免责声明:本文由用户上传,如有侵权请联系删除!
猜你喜欢
- 庆余年哪集是范闲背诗的(庆余年范闲背诗第几集简介介绍)
- 西游记里面的故事简介(西游记的故事有哪些简介介绍)
- dnf男街霸三觉(dnf86级男街霸\/千手罗汉\/暗街之王二觉刷图加点)
- 产品整体概念的主要内容是什么(什么是产品整体概念简介介绍)
- 英雄联盟手游内测怎么申请内测申请攻略(LOL英雄联盟手游内测在哪申请)
- 剑灵一个南天国金币可以换多少银币(剑灵南天国铁币,银币在哪获得)
- 凯里欧文到底多高(凯里欧文的身高体重是多少简介介绍)
- 申请工伤认定所必需的材料是什么(申请工伤认定所必需的材料是)
- 生日歌歌词(蝶变新生的主题歌歌词)
- 中餐与西餐有什么区别(中餐与西餐有什么区别)
- 索爱k506c(用索爱k510的进一下)
- 我们结婚了初恋夫妇表演舞台(我们结婚了初恋夫妇(泰民)
最新文章
- 中国好声音如果没有你李昊瀚(山野中国好声音李昊瀚唱的那么好为什么淘汰)
- 被套的尺寸是多少(被套尺寸一般是多少简介介绍)
- 怪物x联盟复刻版攻略(怪物x联盟复刻祥云马)
- 阳历是快的还是慢得(快的和慢的哪个是阳历简介介绍)
- 英雄联盟赵信特战先锋(特战先锋德邦总管赵信)
- 凤凰传奇有一首歌叫什么(凤凰传奇有一首歌歌词有)
- 为什么腾讯视频看不了直播(腾讯lpl视频看不了怎么办)
- Blue(Da(Ba Dee) 歌词)
- 联想z475开机黑屏(联想Z475开机超慢怎么回事)
- 吴建豪舞林大会跳的舞(2011舞林大会吴建豪怎么没有看见进复赛)
- 海清结婚了吗现在怎么样了(海清结婚了吗)
- 开十字绣店到哪里进货(开十字绣店在哪里进货怎么进货呢)
- 卫庄大战六剑奴是哪一集(卫庄哪集说的六剑奴是值得一战的对手)
- 微信六年来第一次开始“变脸”为什么
- iphone怎么看已连接wifi密码(iPhone怎么越狱啊)
- 求K233次列车(15车厢的座位号)
- 能链综合能源港里的充电站为何成为香饽饽
- 鸡蛋怎么做比较有营养(鸡蛋怎么做比较好吃)
- lol手游霞怎么出装(LOL新英雄霞与洛逆羽霞如何出装霞怎么出装)
- 穿越火线什么时候上架(穿越火线什么时候能玩)
- 北比臼舅怎么读(北比臼日怎么读)
- 创世之柱任务有什么用(创世之柱任务怎么做)
- 徐磊的歌曲(写给你的歌 徐磊乐演唱作品)
- 广州市经济适用住房准购证明怎么办理(如何取得广州市经济适用住房准购证明)